
3D scanning
Volumetric video

Stereoscopic video
Photogrammetry and 3D scanning
3D scanning can preserve both the physical accuracy and the interactive potential of many real-world subjects, arguably making it a great halfway point between photography and computer-generated models.


By their very nature, photogrammetry models and 3D scans are full of high-fidelity detail that deserves to be explored in 3D. It follows that 3D scans look amazing when viewed in augmented and virtual reality.
Some of the technology we use includes micro, macro, aerial and video-based photogrammetry, aided by focus stacking, multi-camera arrays and marker tracking. We also use LiDAR/depth-sensing devices.
Volumetric Video Capture
3D scanning is great for stationary objects – such as buildings, fossils and vehicles – but what about moving subjects? That’s where volumetric capture comes in: Making use of depth-sensing cameras to capture the 3D geometry of a moving subject.


Volumetric video is the true-3D equivalent to conventional video. It captures the visual likeness of the subject just like ordinary video; but also grabs its’ geometric shape, per frame. That means that viewers will see a 3D hologram conveying the authentic shape and movement of a living subject, without intervention from digital artists or developers.
Stereoscopic video
Stereoscopic video is based on using two cameras set up next to each other and at the same distance to the subject to emulate the left and right eye. This creates plasticity and depth when the separate videos are composed next to each other in post-production, resulting in a “3D effect”.
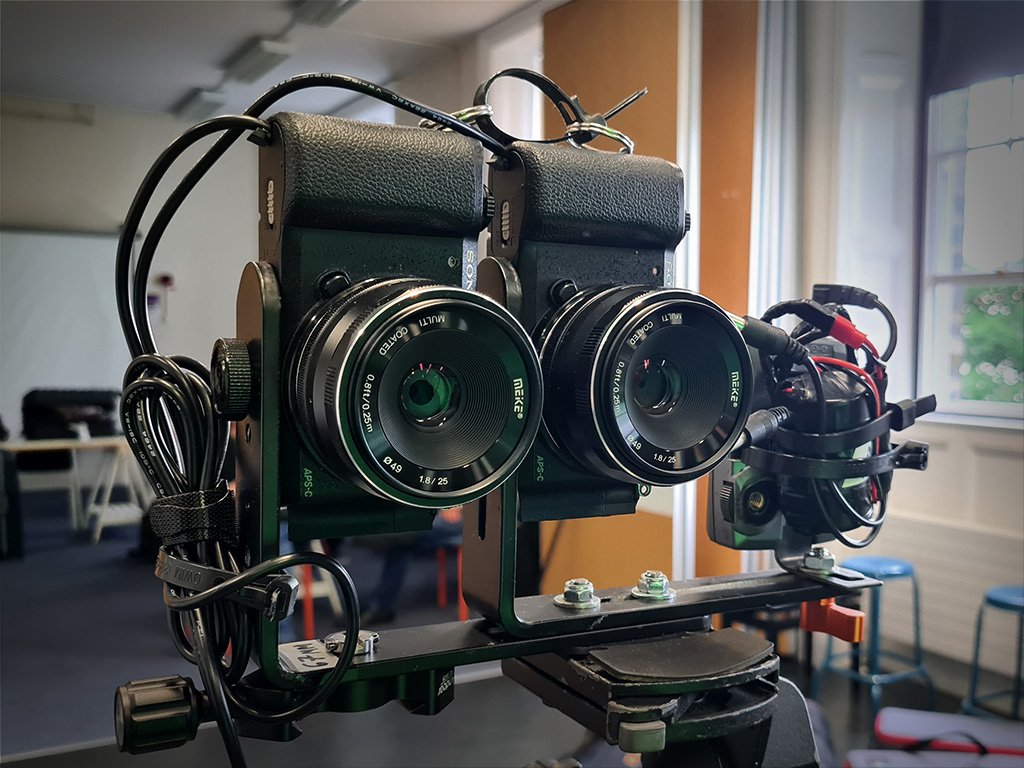

Zubr uses this technique when filming characters on greenscreen to be able to freely place captures of humans in augmented or virtual environments.